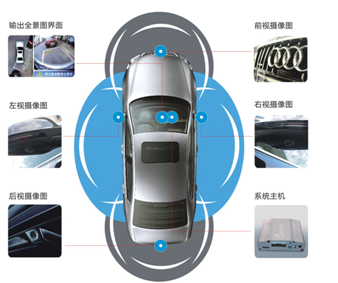
全景影像停车辅助系统
全景泊车停车辅助系统由安装在车身前后左右的四个超广角鱼眼摄像头,同时采集车辆四周的影像,经过图像处理单元畸变还原→视角转化→图像拼接→图像增强,最终形成一幅车辆四周无缝隙的360度全景俯视图。在显示全景图的同时,也可以显示任何一方的单视图,并配合标尺线准确地定位障碍物的位置和距离。
-
选择特殊符号
选择搜索类型
请输入搜索
全景泊车停车辅助系统由安装在车身前后左右的四个超广角鱼眼摄像头,同时采集车辆四周的影像,经过图像处理单元畸变还原→视角转化→图像拼接→图像增强,最终形成一幅车辆四周无缝隙的360度全景俯视图。在显示全景图的同时,也可以显示任何一方的单视图,并配合标尺线准确地定位障碍物的位置和距离。
它是车辆的一个配置 坡道起步辅助控制系统 在斜坡或光滑山路上,车辆从刹车转入加速状态时可能会后退滑行,坡面启动辅助控制系统将自动介入,通过启动刹车系统杜绝车辆倒退。
上坡辅助系统是在esp系统基础上衍生开发出来的一种功能,可以让车辆在不使用手刹情况下在坡上停车起步,以防止溜车造成事故发生。上坡辅助系统启动条件:1、换挡杆位于p挡外的任何位置;2、油门踏板未踩下;3...
公交车的驾驶辅助系统可以提高驾驶安全性和效率,但是也需要更多的研发投入和制造成本。

 9E汽机辅助系统讲义
9E汽机辅助系统讲义
9E汽机辅助系统讲义
1 目 录 第 一 章: 主汽系统及本体测点( 1VVP&2GSE )----------02 第 二 章: 疏水系统( 2GPV) ---------------------------------06 第 三 章: 轴封系统( 2CET)---------------------------------09 第 四 章: 凝结水系统( 2CEX)------------------------------15 第 五 章: 真空系统( 2CVI )----------------------------------24 第 六 章: 压缩空气系统( 2SAP)----------------------------28 第 七 章: 工业水系统( 2SRA)-------------------------------34 第 八 章: 循环水系统( 2CRF&2CPC )-----
 地铁车辆辅助系统两种供电网络的分析
地铁车辆辅助系统两种供电网络的分析
地铁车辆辅助系统两种供电网络的分析
地铁车辆辅助系统两种供电网络的分析
影像仪是依托于计算机屏幕测量技术和强大的空间几何运算软件而存在的。影像测量仪又分全自动影像测量仪(又名CNC影像仪)与手动影像测量仪两种。影像仪以非接触式测量为主要测量方式,通过长期的技术经验的积累,自动影像仪在功能上逐步的延伸,配合探针和激光组的使用,出现介于二维和三维几何尺寸测量的仪器,业内称为"2.5D影像测量仪"。
在物镜的焦面上平行于飞行方向设置一条狭缝,地面景物在相机内滚筒上的弧形胶片上聚焦成像,物镜在垂直于航线方向扫描,就得到一幅扫描成像的地面图像。物镜摆幅很大,可实现宽摄像覆盖要求,能将航线两边的地平线内的影像都摄入底片。由于全景相机的像距保持不变,而物聚随扫描角的增大而增大,因此和航线正下方的中心部位相比,就会出现两边比例尺会逐渐缩小的现象,整个影像产生全景畸变。另外在扫描的同时,飞机向前飞行,以及扫描摆动的非线性等因素,使影像的畸变更为复杂。由于全景相机的照片几何关系不如分幅式相机严格,存在畸变,因此常用于军事侦察、发现和识别目标,而不用于精确定位。
将各个摄像头采集的视频信号进行合理分割处理后显示在液晶屏幕上,让驾驶员实时监视汽车行驶中各个方位的驾驶状况。也称"360全景泊车辅助系统或全景影像安全系统。