原形态顶生叶2枚,叶片长圆形或披针形,先端急尖,基部渐狭为柄。花葶单一,侧生于假鳞茎顶端,高度短于叶。基部被鞘;总状花序点垂;苞片极小;花黄绿色,唇瓣浅白色带紫色斑点;中萼片卵状三角形,长约1cm,宽2mm,先端渐尖;侧萼片镰状三角形,宽于中萼片;萼囊短、钝;花瓣狭披针形,与萼片近等长,宽1.2mm;唇瓣3裂,长7mm,侧裂片半圆形,宽约2mm,中裂片卵状三角形,长于侧裂片,唇盘上表面从基部至中裂片先端纵贯三条褶片。
-

选择特殊符号
选择搜索类型
请输入搜索
原形态半柱毛兰,附生植物,高20cm以上。全株无毛。假鳞茎近聚生,卵形或长圆形,长2-6cm,粗1-3cm,基部被鞘状叶。
生态环境:附生于树上或林下岩石上。
资源分布:分布于福建、台湾、广东、海南、广西、云南、贵州。
原形态顶生叶2枚,叶片长圆形或披针形,先端急尖,基部渐狭为柄。花葶单一,侧生于假鳞茎顶端,高度短于叶。基部被鞘;总状花序点垂;苞片极小;花黄绿色,唇瓣浅白色带紫色斑点;中萼片卵状三角形,长约1cm,宽2mm,先端渐尖;侧萼片镰状三角形,宽于中萼片;萼囊短、钝;花瓣狭披针形,与萼片近等长,宽1.2mm;唇瓣3裂,长7mm,侧裂片半圆形,宽约2mm,中裂片卵状三角形,长于侧裂片,唇盘上表面从基部至中裂片先端纵贯三条褶片。
吊臂起重机就是通过支撑将货物称起
与龙门刨相似,只是比龙门刨少一个立柱,如下链接图片http://m.baidu.com/from=1269a/bd_page_type=1/ssid=0/uid=0/pu=usm%401%2Csz%4...
护臂环筋手算的长度要少,请问这个72根怎么来的 ? 环筋手算的长度少,看你计算的是否正确,环筋需要互相搭接并且加弯勾的.(二级钢不用弯勾.)这个72根是根据护臂高度除间距计算出来...

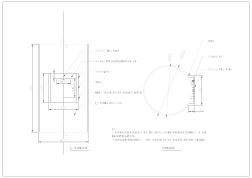 灯杆上焊接监控支臂法兰图
灯杆上焊接监控支臂法兰图
灯杆上焊接监控支臂法兰图
灯杆上焊接监控支臂法兰图
 输油臂绝缘法兰适用性探讨
输油臂绝缘法兰适用性探讨
输油臂绝缘法兰适用性探讨
介绍了输油码头从静电产生及实际应用角度出发,通过对采用船、岸跨接电缆和采用装载臂安装绝缘法兰、输油软管装设不导电短管两种做法的比较,探讨更安全的解决方法,说明可以通过合理地运用静电连线和绝缘法兰,保证船岸连接时的安全。
机器人系统是由视觉传感器、机械臂系统及主控计算机组成,其中机械臂系统又包括模块化机械臂和灵巧手两部分。整个系统的构建模型如图1所示。
近年来,随着机器人技术的发展,应用高速度、高精度、高负载自重比的机器人结构受到工业和航空航天领域的关注。由于运动过程中关节和连杆的柔性效应的增加,使结构发生变形从而使任务执行的精度降低。所以,机器人机械臂结构柔性特征必须予以考虑,实现柔性机械臂高精度有效控制也必须考虑系统动力学特性。柔性机械臂是一个非常复杂的动力学系统,其动力学方程具有非线性、强耦合、实变等特点。而进行柔性臂动力学问题的研究,其模型的建立是极其重要的。柔性机械臂不仅是一个刚柔耦合的非线性系统,而且也是系统动力学特性与控制特性相互耦合即机电耦合的非线性系统。动力学建模的目的是为控制系统描述及控制器设计提供依据。一般控制系统的描述(包括时域的状态空间描述和频域的传递函数描述)与传感器/执行器的定位,从执行器到传感器的信息传递以及机械臂的动力学特性密切相关。
柔性机械臂动力学方程的建立主要是利用Lagrange方程和NeWton-Euler方程这两个最具代表性的方程。另外比较常用的还有变分原理,虚位移原理以及Kane方程的方法。 而柔性体变形的描述是柔性机械臂系统建模与控制的基础。因此因首先选择一定的方式描述柔性体的变形,同时变形的描述与系统动力学方程的求解关系密切。
柔性体变形的描述主要有以下几种:
1)有限元法;
2)有限段法;
3)模态综合法;
4)集中质量法。
无论是连续或离散的动力学模型,其建模方法主要基于两类基本方法:矢量力学法和分析力学法。应用较广泛同时也是比较成熟的是Newton-Euler公式、Lagrange方程、变分原理、虚位移原理和Kane方程。
对柔性机械臂的控制一般有如下方式:
1)刚性化处理。完全忽略结构的弹性变形对结构刚体运动的影响。例如为了避免过大的弹性变形破坏柔性机械臂的稳定性和末端定位精度,NASA的遥控太空手运动的最大角速度为0.5deg/s。
2)前馈补偿法。将机械臂柔性变形形成的机械振动看成是对刚性运动的确定性干扰而采用前馈补偿的办法来抵消这种干扰。德国的Bernd Gebler研究了具有弹性杆和弹性关节的工业机器人的前馈控制。张铁民研究了基于利用增加零点来消除系统的主导极点和系统不稳定的方法,设计了具有时间延时的前馈控制器,和PID控制器比较起来,可以更加明显的消除系统的残余振动。Seering Warren P.等学者对前馈补偿技术进行了深入的研究。
3)加速度反馈控制。Khorrami FarShad和Jain Sandeep研究了利用末端加速度反馈控制柔性机械臂的末端轨迹控制问题。
4)被动阻尼控制。为降低柔性体相对弹性变形的影响 选用各种耗能或储能材料设计臂的结构以控制振动。或者在柔性梁上采用阻尼减振器、阻尼材料、复合型阻尼金属板、阻尼合金或用粘弹性大阻尼材料形成附加阻尼结构均属于被动阻尼控制。近年来,粘弹性大阻尼材料用于柔性机械臂的振动控制已引起高度重视。Rossi Mauro和Wang David研究了柔性机器人的被动控制问题。
5)力反馈控制法。柔性机械臂振动的力反馈控制实际上是基于逆动力学分析的控制方法,即根据逆动力学分析,通过臂末端的给定运动求得施加于驱动端的力矩,并通过运动或力检测对驱动力矩进行反馈补偿。
6)自适应控制。采用组合自适应控制,将系统划分成关节子系统和柔性子系统。利用参数线性化的方法设计自适应控制规则来辨识柔性机械臂的不确定性参数。对具有非线性和参数不确定性的柔性机械臂进行了跟踪控制器的设计。控制器的设计是依据Lyapunov方法的鲁棒和自适应控制设计。通过状态转换将系统分成两个子系统。用自适应控制和鲁棒控制分别对两个子系统进行控制。
7)PID控制。PID控制器作为最受欢迎和最广泛应用的控制器,由于其简单、有效、实用,被普遍地用于刚性机械臂控制,常通过调整控制器增益构成自校正PID控制器或与其它控制方法结合构成复合控制系统以改善PID控制器性能。
8)变结构控制。变结构控制系统是一种不连续的反馈控制系统,其中滑模控制是最普遍的变结构控制。其特点:在切换面上,具有所谓的滑动方式,在滑动方式中系统对参数变化和扰动保持不敏感,同时,它的轨迹位于切换面上,滑动现象并不依赖于系统参数,具有稳定的性质。变结构控制器的设计,不需要机械臂精确的动态模型,模型参数的边界就足以构造一个控制器。
9)模糊与神经网络控制。是一种语言控制器,可反映人在进行控制活动时的思维特点。其主要特点之一是控制系统设计并不需要通常意义上的被控对象的数学模型,而是需要操作者或专家的经验知识、操作数据等。
与刚性机械臂相比较,柔性机械臂具有结构轻、载重/自重比高等特性,因而具有较低的能耗、较大的操作空间和很高的效率,其响应快速而准确,有着很多潜在的优点,在工业、国防等应用领域中占有十分重要的地位。随着宇航业及机器人业的飞速发展,越来越多地采用由若干个柔性构件组成的多柔体系统。传统的多刚体动力学的分析方法及控制方法已不能满足多柔体系统的动力分析及控制的要求。柔性机械臂作为最简单的非平凡多柔体系统,被广泛地用作多柔体系统的研究模型。
单臂吊是利用单个立柱和回转臂来起吊货物的一种起重设备。单臂吊的立柱下端一般固定在混凝土的基础上,回转臂可以根据客户的需要来进行旋转 。